Feline-inspired vision technology enhances accuracy in challenging environments, paving the way for smarter, more efficient autonomous systems.
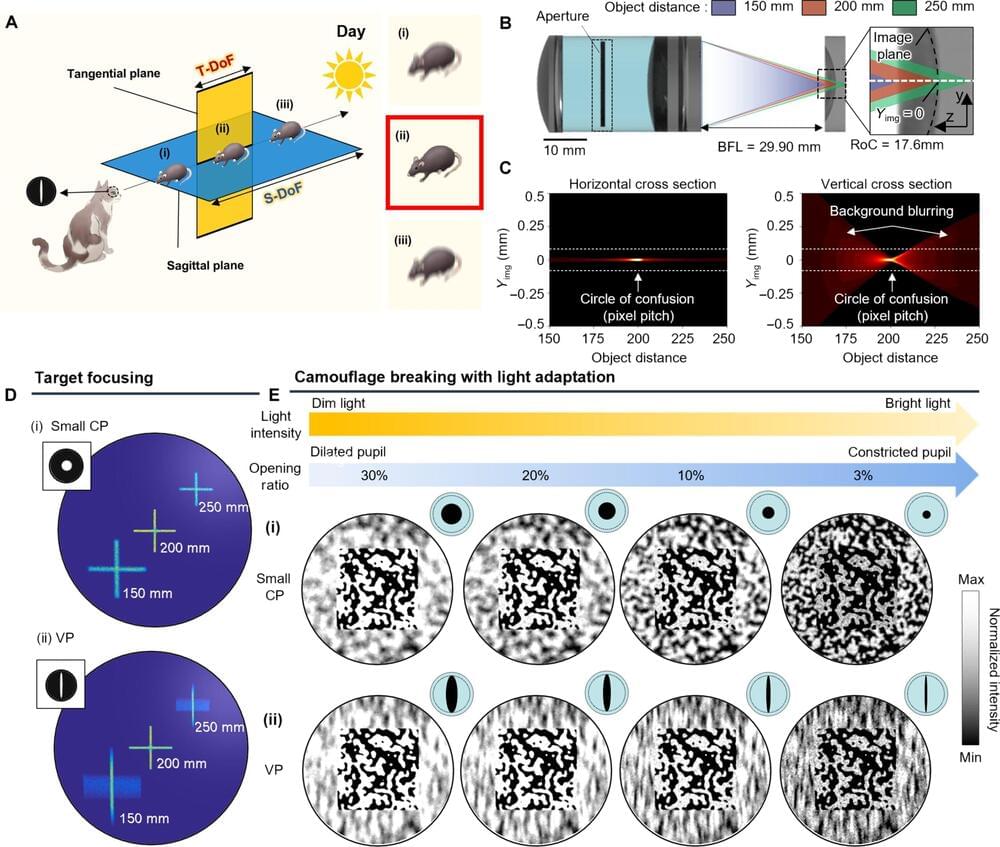
Researchers have unveiled a vision system inspired by feline eyes to enhance object detection in various lighting conditions. Featuring a unique shape and reflective surface, the system reduces glare in bright environments and boosts sensitivity in low-light scenarios. By filtering unnecessary details, this technology significantly improves the performance of single-lens cameras, representing a notable advancement in robotic vision capabilities.
Autonomous systems like drones, self-driving cars, and robots are becoming more common in our daily lives. However, they often struggle to “see” well in different environments — like bright sunlight, low light, or when objects blend into complex backgrounds. Interestingly, nature may already have the solution to this problem.