Insects typically have a variety of complex exoskeleton structures, which support them in their movements and everyday activities. Fabricating artificial exoskeletons for insect-inspired robots that match the complexity of these naturally-occurring structures is a key challenge in the field of robotics.
Although researchers have proposed several fabrication processes and techniques to produce exoskeletons for insect-inspired robots, many of these methods are extremely complex or rely on expensive equipment and materials. This makes them unfeasible and difficult to apply on a wider scale.
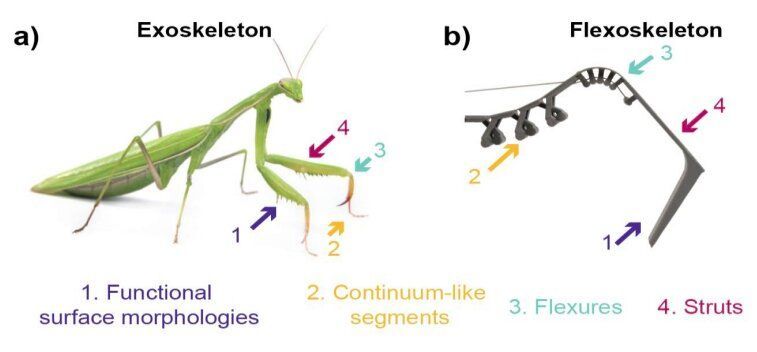
With this in mind, researchers at the University of California in San Diego have recently developed a new process to design and fabricate components for insect-inspired robots with exoskeleton structures. They introduced this process, called flexoskeleton printing, in a paper prepublished on arXiv.
In speaking of insect I get an illusion of limited functionality. When applying operation to include singular body or apparatus control will this be in organizational process to larger fields of science?