In this cohort study, we retrospectively analyzed a large FND cohort using TriNetX, a federated health research platform aggregating electronic health records from approximately 160 million individuals across 143 health care organizations in 17 countries. Diagnoses follow standardized clinical coding. Reporting adhered to the STROBE guideline. This study was exempt from IRB review and informed consent given the use of deidentified data, according to the Common Rule (45 CFR §46) and UK regulations from the Health Research Authority.
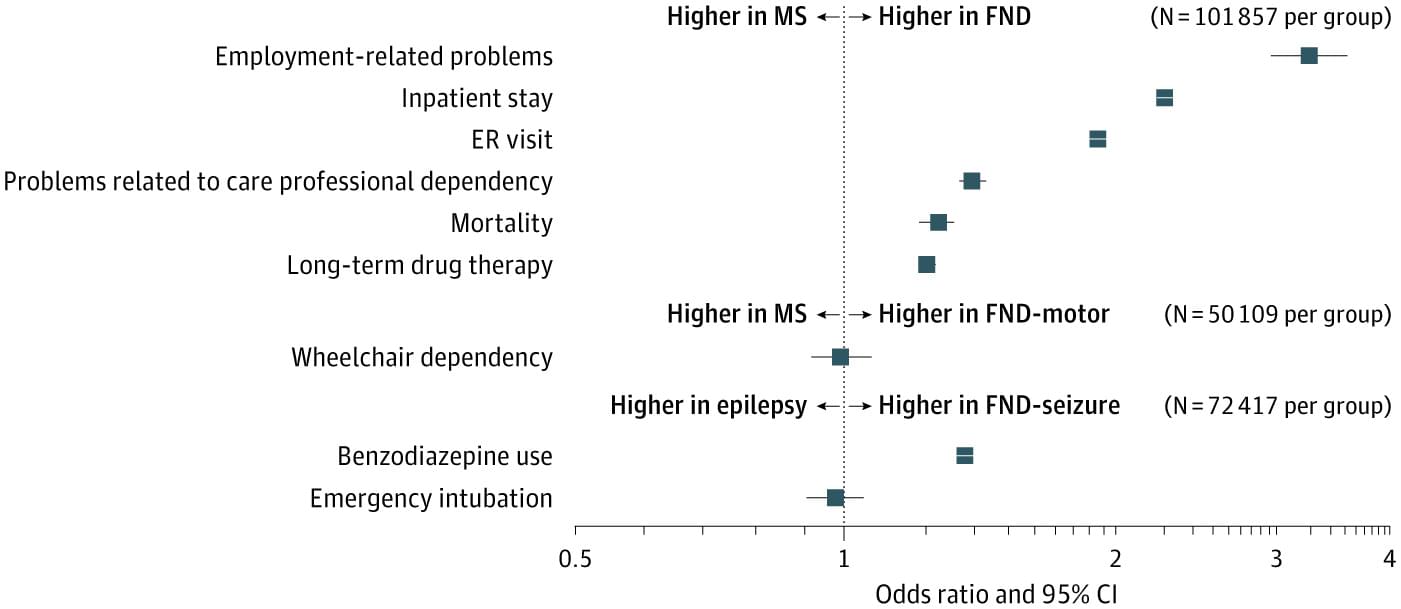
Demographics and lifetime comorbidities were extracted for patients with an initial F44.4-F44.7 diagnosis between 1995 and 2024. Clinical outcomes were compared between matched cohorts with an initial diagnosis between 2015 and 2024 to reflect contemporary care for all FND vs multiple sclerosis (MS; G35), FND-motor vs MS, and FND-seizure vs epilepsy (G40), controlling for age, sex, race, and ethnicity via propensity score matching, testing 2-sided z tests on absolute risk differences at a significance level of P .05 after Bonferroni correction for multiple comparisons, and calculating odds ratios with 95% CIs. Data extraction and analyses were performed in April 2025 on the web-based interface TriNetX LIVE. Full methods are described in eMethods 1 to 3 in Supplement 1.