Page 8177

Feb 19, 2019
This Site Uses Deep Learning to Generate Fake Airbnb Listings
Posted by Quinn Sena in categories: food, habitats, robotics/AI

There’s a four-bedroom Edinburgh unit with “original wood floors,” listed by Christine. And there’s a two-bathroom apartment in Gainesville with a double sofa bed and open kitchen plan, listed by Michel. A “beautiful apartment” in Berlin has a “floral feeling.” A three-bedroom in Rome includes “utilities and toiletries.”
There’s just one problem with these Airbnb listings: they don’t exist.
Feb 19, 2019
EU urged to back lab-grown meat to feed ‘unsustainable’ European consumption
Posted by Quinn Sena in category: food

Feb 19, 2019
**Suicide system in tuberculosis bacteria might hold key to treatment
Posted by Quinn Sena in category: biotech/medical
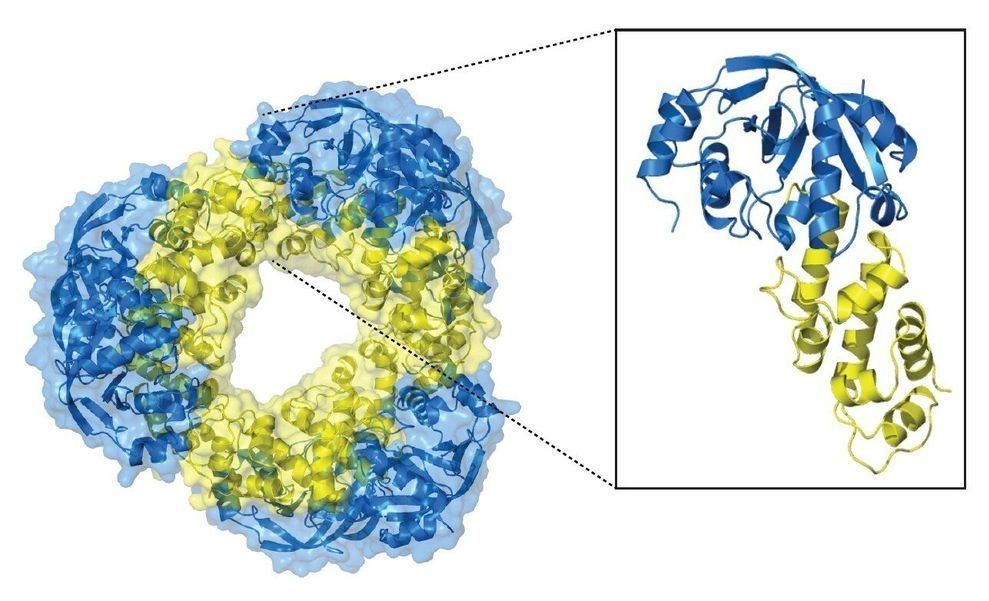
Tuberculosis (TB) is one of the top 10 causes of death worldwide. In 2017, 10 million people around the world fell ill with TB and 1.3 million died. The genome of the bacterium that causes TB holds a special toxin-antitoxin system with a surprising function: Once the toxin is activated, all bacterial cells die, stopping the disease. An international research team co-led by the Wilmanns group at EMBL in Hamburg investigated this promising feature for therapeutic targets. They now share the first high-resolution details of the system in Molecular Cell.
Mycobacterium tuberculosis is the bacterium that causes TB in humans. Its genome holds 80 so-called toxin-antitoxin (TA) systems, sets of closely linked genes that encode both a toxic protein and an antitoxin—a toxin-neutralising antidote.
When the bacteria are growing normally, toxin activity is blocked by the antitoxin’s presence. But under stress conditions such as lack of nutrients, dedicated enzymes rapidly degrade the antitoxin molecules. This activates the toxin proteins in the cell and slows down the growth of the bacteria, allowing them to survive the stressful environment.
Continue reading “**Suicide system in tuberculosis bacteria might hold key to treatment” »
Feb 19, 2019
The open-source movement to hack your arugula
Posted by Quinn Sena in categories: cybercrime/malcode, food
95 percent less water circa 2018.
Open-source farming could challenge Big Ag and take crop production to new heights.
Continue reading “The open-source movement to hack your arugula” »
Feb 19, 2019
Observation of quantized heating in quantum matter
Posted by Quinn Sena in categories: energy, law, mathematics, quantum physics
Shaking a physical system typically heats it up, in the sense that the system continuously absorbs energy. When considering a circular shaking pattern, the amount of energy that is absorbed can potentially depend on the orientation of the circular drive (clockwise/anti-clockwise), a general phenomenon known as circular dichroism.
In 2017, Nathan Goldman (ULB, Brussels), Peter Zoller (IQOQI, Innsbruck) and coworkers predicted that circular dichroism can be quantized in quantum systems (heating is then constrained by strict integers) forming a “topological state.” According to this theoretical prediction, the quantization of energy absorption upon circular driving can be directly related to topology, a fundamental mathematical concept that characterizes these intriguing states of matter.
Writing in Nature Physics, the experimental group of Klaus Sengstock and Christof Weitenberg (Hamburg), in collaboration with the team of Nathan Goldman, reports on the first observation of quantized circular dichroism. Following the theoretical proposal of Goldman, Zoller et al., the experimentalists realized a topological state using an ultracold atomic gas subjected to laser light, and studied its heating properties upon circular shaking of the gas. By finely monitoring the heating rates of their system, for a wide range of driving frequencies, they were able to validate the quantization law predicted by Goldman, Zoller et al. in 2017, in agreement with the underlying topological state realized in the laboratory.
Feb 19, 2019
Great white shark genome decoded
Posted by Quinn Sena in categories: biotech/medical, entertainment

The great white shark is one of the most recognized marine creatures on Earth, generating widespread public fascination and media attention, including spawning one of the most successful movies in Hollywood history. This shark possesses notable characteristics, including its massive size (up to 20 feet and 7,000 pounds) and diving to nearly 4,000 foot depths. Great whites are also a big conservation concern given their relatively low numbers in the world’s oceans.
In a major scientific step to understand the biology of this iconic apex predator and sharks in general, the entire genome of the white shark has now been decoded in detail.
A team led by scientists from Nova Southeastern University’s (NSU) Save Our Seas Foundation Shark Research Center and Guy Harvey Research Institute (GHRI), Cornell University College of Veterinary Medicine, and Monterey Bay Aquarium, completed the white shark genome and compared it to genomes from a variety of other vertebrates, including the giant whale shark and humans.
Feb 19, 2019
Giant Wind Power Transmission Project Could Spark New Wind Rush In Wind Belt
Posted by Quinn Sena in category: energy
![]()
Wow, anybody remember the Grain Belt Express? No? No wonder! The massive 700-mile wind power transmission project in the US Midwest has been on the boards since at least 2011. It got off to a promising start but suffered death by a thousand cuts when state officials in Missouri balked.
Well, it looks like the naysayers forgot to cut off its head or at least sever the spinal cord, because the Grain Belt Express could come back to walk the Earth once more.
Continue reading “Giant Wind Power Transmission Project Could Spark New Wind Rush In Wind Belt” »
Feb 19, 2019
Meet The Desk-Sized Turbine That Can Power A Small Town
Posted by Quinn Sena in category: energy

Feb 19, 2019
Scientists Developed an AI So Advanced They Say It’s Too Dangerous to Release
Posted by Quinn Sena in categories: Elon Musk, robotics/AI
A group of computer scientists once backed by Elon Musk has caused some alarm by developing an advanced artificial intelligence (AI) they say is too dangerous to release to the public.
OpenAI, a research non-profit based in San Francisco, says its “chameleon-like” language prediction system, called GPT–2, will only ever see a limited release in a scaled-down version, due to “concerns about malicious applications of the technology”.
That’s because the computer model, which generates original paragraphs of text based on what it is given to ‘read’, is a little too good at its job.
Continue reading “Scientists Developed an AI So Advanced They Say It’s Too Dangerous to Release” »








