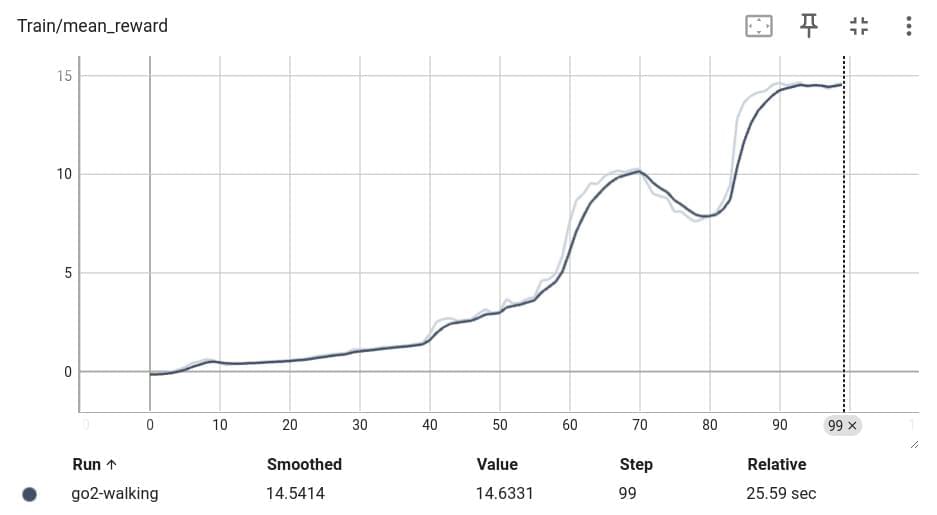
Genesis supports parallel simulation, making it ideal for training reinforcement learning (RL) locomotion policies efficiently. In this tutorial, we will walk you through a complete training example for obtaining a basic locomotion policy that enables a Unitree Go2 Robot to walk. With Genesis, you will be able to train a locomotion policy that’s deployable in real-world in less than 26 seconds (benchmarked on a RTX 4090).
Acknowledgement: This tutorial is inspired by and builds several core concepts from Legged Gym.









Leave a reply